查看树莓派引脚¶
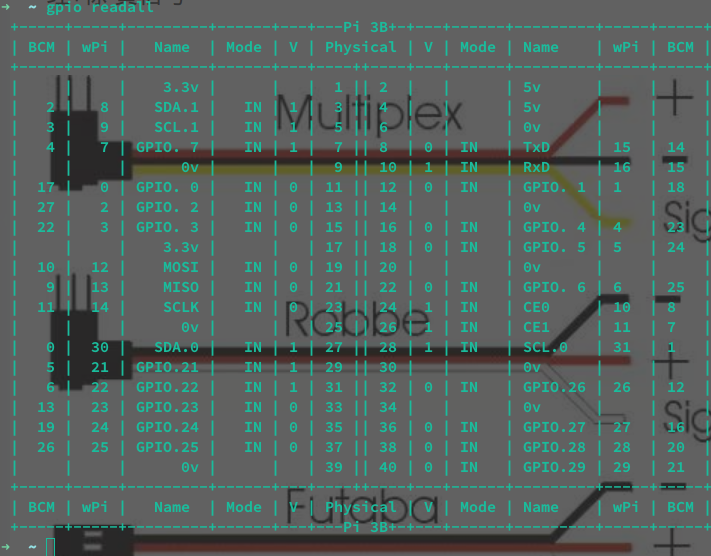
硬件接口:
SG90 一共三根线,红线接5v电源,棕线GND,黄线为数据控制线,接到GPIO上舵机参数:
SG90 脉冲周期为20ms,脉宽0.5ms-2.5ms对应的角度-90到+90,对应的占空比为2.5%-12。
与步进电机不同,伺服电机不占用许多GPIO引脚来控制运动。 为此,旋转由脉冲的长度控制。
电机的角度沿脉冲长度设置,因此PWM特别有用,它以均匀的间隔发送重复信号(必须安装Raspberry Pi Python库)。
建一个python文件,代码如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
| import RPi.GPIO as GPIO
import time
servoPIN = 17
GPIO.setmode(GPIO.BCM)
GPIO.setup(servoPIN, GPIO.OUT)
p = GPIO.PWM(servoPIN, 50)
p.start(2.5)
try:
while True:
p.ChangeDutyCycle(5)
time.sleep(0.5)
p.ChangeDutyCycle(7.5)
time.sleep(0.5)
p.ChangeDutyCycle(10)
time.sleep(0.5)
p.ChangeDutyCycle(12.5)
time.sleep(0.5)
p.ChangeDutyCycle(10)
time.sleep(0.5)
p.ChangeDutyCycle(7.5)
time.sleep(0.5)
p.ChangeDutyCycle(5)
time.sleep(0.5)
p.ChangeDutyCycle(2.5)
time.sleep(0.5)
except KeyboardInterrupt:
p.stop()
GPIO.cleanup()
|



