第一章 容器发展之路¶
运营成本:OPEX
资金性支出:CAPEX
容器模型与虚拟机的区别:容器的运行不会独占操作系统。运行在相同宿主主机上的容器是共享一个操作系统,节省大量的系统资源,节省在许可证上的花销,以及为OS打补丁等运维成本。启动快,便于迁移。
运行中的容器共享主机的内核。
Kubernetes提供热插拔的容器运行时接口CRI。默认容器为Docker。
第二章 走进Docker¶
Docker是一种运行在Linux和Win上的软件,用于创建、管理和编排容器。
Docker引擎是用于运行和编排容器的基础设施工具,是运行容器的核心容器运行时。
Docker版本号遵循YY.MM-xx格式。
Docker公司的一个核心哲学通常称为"含电池,但可拆卸"(Batteries included but removable)。即许多Docker内置的组件都可以替换为第三方组件。
OCI(开放容器计划)是CoreOS和Docker共同成立的管理委员会,发布镜像规范和运行时规范。
第三章 Docker安装¶
Win版Docker¶
- 属于社区版,并不适用于生产环境。
- 通过启动一个独立的引擎来提供Docker环境。
- 某些版本特性可能延迟支持,稳定性第一,新特性其次。
Mac版Docker¶
- 属于社区版,并不是为了生产环境进行设计的。
- 运行在一个轻量级的Linux VM之上。
Linux版Docker¶
Docker EE包含Docker CE中的全部功能,还包括了商业支持和其他Docker产品的集成。
使用shell脚本的安装步骤如下:
1 | wget -qO- https://get.docker.com/ | sh |
查看docker版本:
1 | docker --version |
查看docker信息:
1 | docker system info |
设置docker开机自启:
1 | sudo systemctl enable docker |
检查确保docker的容器和服务都已经重启成功:
1 | docker container ls |
升级Docker引擎¶
升级关键步骤:
- 确保容器配置了正确的重启策略;在Swarm Mode模式下使用服务时,需要正确配置了draining node。
- 停止Docker守护程序
- 移除旧版本Docker
- 安装新版本Docker
- 配置新版本的Docker为开机自启动
- 确保容器重启成功
Docker存储驱动的选择¶
每个Docker容器都有一个本地存储空间,用于保存层叠的镜像层(Image Layer)以及挂载的容器文件系统。默认情况下,容器的所有读写操作发生在其镜像层上或挂载的文件系统中。
存储驱动在上层抽象设计中都采用了栈式镜像层存储和写时复制(Copy-on-Write)的设计思想。
存储驱动对Docker的性能和稳定性至关重要。
在Linux上,Docker可选择的一些存储驱动包括AUFS(最原始也是最老的)、Overlay2(可能是未来最佳选择)、Device Mapper、Btrfs和ZFS。
在Win上,Docker只支持Windows Filter一种存储驱动。
存储驱动的选择是节点级别的。即,每个docker主机只能选择一种存储驱动。不能为每个容器选择不同的存储驱动。在Linux上,修改/etc/docker/deamon.json文件来修改存储引擎配置。*修改完之后需要重启Docker才能生效。*如:
1 | { |
如果修改了正在运行的docker主机的存储引擎类型,则现有的镜像和容器在重启之后将不可用,因为每种存储驱动在主机上存储镜像层的位置不一样(通常在/var/lib/
修改了存储驱动的类型,docker就无法找到原有的镜像和容器。切换回原本的存储驱动能继续使用之前的镜像和容器。如果在切换存储引擎之后,还想使用之前的镜像和容器,则需要将镜像保存为Docker格式,上传到某个镜像仓库,修改本地Docker引擎并重启,之后从镜像仓库将镜像拉取到本地,最后重启容器。
检查Docker当前的存储驱动类型:docker system info。
版本推荐选择:
- Red Hat Enterprise Linux:4.x版本内核或更高版本+Docker 17.06版本或更高版本,建议使用Overlay2。
- Red Hat Enterprise Linux:低版本内核或低版本的Docker,建议使用Device Mapper。
- Ubuntu Linux:4.x版本内核或更高版本,建议使用Overlay2。
- Ubuntu Linux:更早的版本建议使用AUFS。
- SUSE Linux Enterprise Server:Btrfs。
Device Mapper配置¶
大部分Linux存储驱动不需要或需要很少的配置。
Device Mapper通常需要合理配置之后才能表现出良好的性能。
默认情况下,Device Mapper采用loopback mounted sparse file作为底层实现来为Docker提供存储支持。开箱即用,并不适用于生产环境,性能很差。
通过将底层修改为direct-lvm模式,可以获取更好的性能。这种规模下通过使用基于裸块设备(Raw Block Device)的LVM精简池(LVM thin pool)。暂时只能配置一个块设备,并且只有在第一次安装后才能设置生效。但是目前来说有一定的风险。
Docker自动设置direct-lvm¶
如下步骤将Docker配置存储驱动为Device Mapper,并使用direct-lvm模式。
-
将下面的存储驱动配置添加到
/etc/docker/daemon.json当中。1
2
3
4
5
6
7
8
9
10{"storage-driver":"devicemapper"
"storage-opts":[
"dm.directlvm_device=/dev/xdf", # 设置块设备的位置
"dm.thinp_percent=95", # 设置镜像和容器允许适应的最大存储空间占比
"dm.thinp_metapercent=1",# 设置元数据存储允许使用的存储空间大小
"dm.thinp_autoextend_threshold=80",# 设置LVM自动扩展精简池的阈值
"dm.thinp_autoextend_percent=20",# 当触发精简池自动扩容机制的时候,扩容大小应当占现有空间的比例
"dm.directlvm_device_force=false"# 是否将块设备格式化为新的文件系统
]
} -
重启Docker。
-
确认Docker已成功运行,并块设备配置被成功加载。
即使Docker在direct-lvm模式下只能设置单一块设备,其性能显著优于loopback模式。
Docker手动设置direct-lvm¶
前置知识:
-
块设备(Block Device)
在使用direct-lvm模式的时候,需要有可用的块设备。这些块设备应该位于高性能的存储设备之上,如:SSD或外部LUN存储。
-
LVM配置
Docker的Docker Mapper存储驱动底层利用LVM(Logical Volume Manager)来实现,需要配置LVM所需的物理设备、卷组、逻辑卷和精简池。应当使用专用的物理卷并将其配置在相同的卷组中。这个卷组不应当被Docker之外的工作负载所使用。此外还需要配置额外两个逻辑卷,分别存储存储数据和源数据信息。另外要创建LVM配置文件、指定LVM自动扩容的触发阈值,以及自动扩容的大小,并且为自动扩容配置相应的监控,保证自动扩容会被触发。
-
Docker配置
修改Docker配置文件之前要先保存原始文件(etc/docker/daemon.json),然后进行修改。
第四章 纵观Docker¶
运维视角¶
Docker安装主要涉及两个组件:Docker客户端、Docker daemon。
deamon实现了Docker引擎的API。
Linux默认安装时,客户端和daemon之间的通信是通过本地IPC/UNIX Socket完成的(/var/run/docker.sock)。Windows通过名为npipe:////./pipe/docker_engine的管道完成的。
Docker镜像可以理解为一个包含了OS文件系统和应用的对象。
虚拟机模板本质上是处于关机状态的虚拟机。
docker image ls:查看镜像。
拉取(pulling):在Docker主机上获取镜像的操作。
Docker的每个镜像都有自己唯一的ID。用户可以通过引用镜像的ID或名称来使用镜像。如果用户选择使用镜像ID,通常只需要输入ID开头的几个字符即可。
docker container run -it + 镜像名 运行的进程:从镜像中来启动容器。例如:docker container run -it ubuntu:latest /bin/bash或docker container run -it microsoft/powershell:nanoserver pwsh.exe。it参数:开启容器的交互模式并将Shell链接到容器终端。
按Ctrl-PQ组合键,可以在退出容器的同时还保持容器运行。
docker container ls:查看系统内部处于运行状态的容器。-a参数可以列出所有容器,包括处于停止状态的。
docker container stop + 容器对应名称或ID:停止容器运行
docker container rm + 容器对应名称或ID:杀死容器
docker container exec:将shell链接到一个运行中的容器终端。例如:docker container exec -it 容器名称或者id bash。
docker container start <镜像ID>:启动镜像
开发视角¶
每个仓库都包含一个名为Dockerfile文件,这是一个纯文本文件,描述了如何将应用构建到Docker镜像中。 每一行代表一个用于构建镜像的指令。
docker image build -t 镜像名 . :使用当前目录中的Dockerfile文件和应用代码创建新的镜像。构建时间长短是由构建过程中要拉取的镜像大小和复杂度决定的。
第五章 Docker引擎¶
Docker引擎是用来运行和管理容器的核心软件,通常将其代指为Docker或Docker平台。
Docker引擎是模块化的。
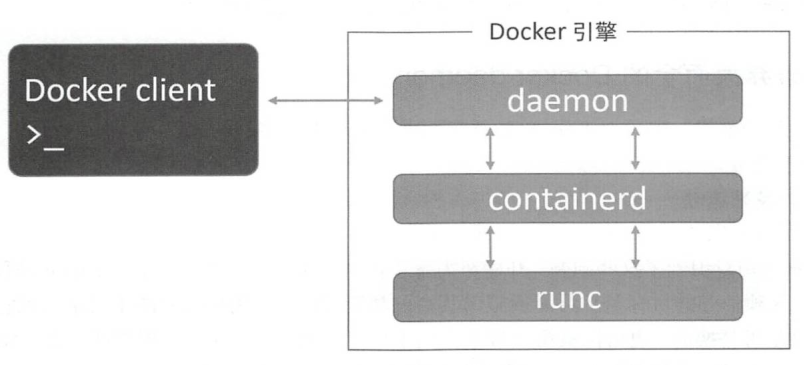
runc是OCi容器运行时规范的参考实现。实质上是一个轻量级的、针对Libcontainer进行了包装的命令行交互工具(Libcontainer取代了早起的LXC)。
runc只有一个功能就是创建容器。本质是一个独立的容器运行时工具。
containerd的主要任务是容器的生命周期管理,也可以进行镜像管理等。containerd组件确保了Docker镜像能够以之后以正确的OCI Bundle的格式传递给runc。
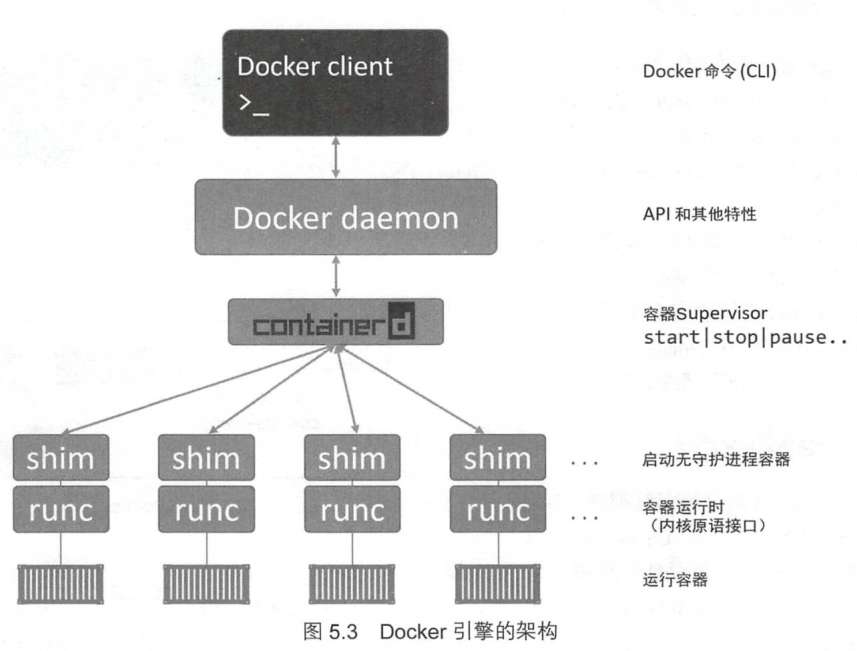
containerd在linux和windows中以daemon的方式运行。Kubernetes可以通过cri-containerd使用containerd。
Daemon使用一种CRUD风格的API,通过gRPC与containerd进行通信。
Daemon的主要功能包括镜像管理、镜像构建、REST API、身份验证、安全、核心网络、编排。
一旦Daemon接收到创建新容器的命令,就会向containerd发出调用。containerd指挥runc去做。containerd将Docker镜像转换成OCI bundle,并让runc基于此创建一个新的容器。runc与操作系统内核接口进行通信,基于所有必要的工具(Namespace、CGroup等)来创建容器。容器进程作为runc的子进程启动。启动完毕后,runc退出。
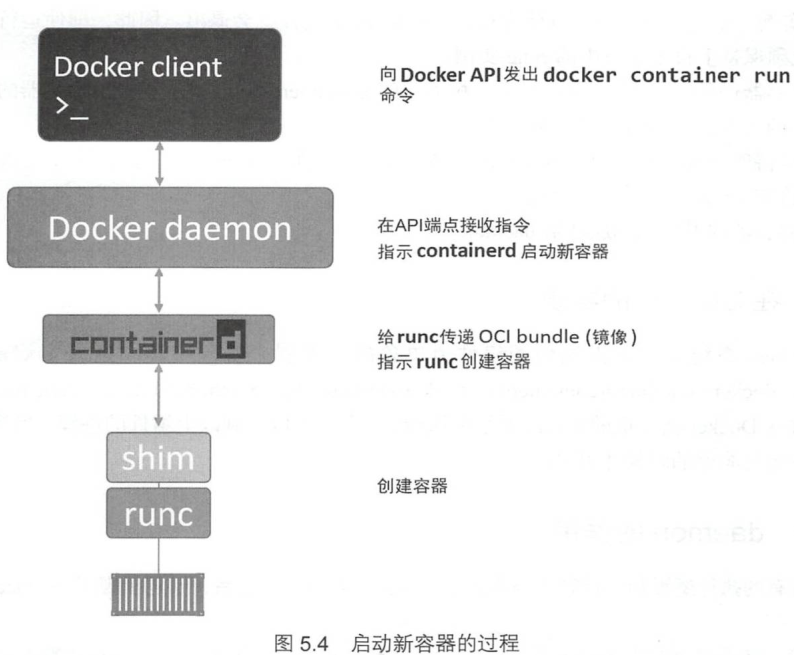
将所有的用于启动、管理容器的逻辑和代码从daemon中移除,以为者容器运行时与Docker daemon是解耦的,称之为“无守护进程的容器”。因此,Docker daemon的维护和升级不会影响运行中的容器。
每次创建容器shimfork一个新的runc实例。一旦容器创建完毕,对应的runc进程退出。
一旦容器进程的父进程runc进程退出,相关联的containerd-shim进程就会成为容器的父进程。
shim的部分职责:1.保持所有STDIN和STDout流是开启的,从而当daemon重启时,容器不会因为管道的关闭而终止。2.将容器的退出状态反馈给daemon。
第六章 Docker镜像¶
镜像由多层构成。内部是一个精简的操作系统,包括应用运行所必须的文件和依赖包。
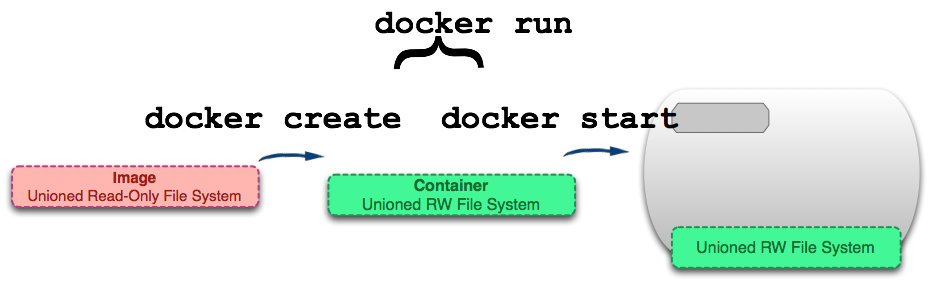
docker container run和docker service create命令从某个镜像启动一个或多个容器。
一旦容器从镜像启动后,二者之间变成相互依赖关系,并且在镜像上启动的容器全部停止之前,镜像是无法被删除的。
通常Docker镜像中只有一个精简的shell,甚至没有shell。镜像不包含内核,容器共享所在Docker主机的内核。
容器只包含必要的操作系统(通常只有操作系统文件和文件系统对象)。
Hyper-V容器运行在专业用的轻量级VM上,同时利用VM内部的操作系统内核。
Linux Docker主机本地镜像仓库通常位于/var/lib/docker/\<stroage-drivewr>,Windows Docker主机是C:\ProgramData\docker\windowsfilter。
docker image pull <repository>:<tag>:拉取镜像。如果用户没有指定具体的镜像标签,默认拉取标签为latest的镜像。Docker镜像存储在镜像仓库服务中。客户端中的镜像仓库服务默认是使用Docker Hub。
标签为latest的镜像并不一定是最新的,但是使用的时候依然要谨慎。
docker image pull <所有者>/<repository>:<tag>:拉取非官方的Docker hub仓库的镜像。
docker pull <第三方镜像仓库服务的DNS名称>/<所有者>/<repository>:<tag>:从第三方仓库拉取镜像
以上拉取镜像的命令可以加-a参数,下载仓库中的全部镜像。如果镜像仓库中同时包含用于多个平台或者架构的镜像,那么命令可能会失败。
镜像仓库服务包含多个镜像仓库。一个镜像仓库包含多个镜像。
标签是存放在镜像元数据中的任意数字或字符串。一个镜像可以根据用户需要设置多个标签。
悬虚镜像:没有标签的镜像,在列表时显示为<none>:<none>。通常出现这种情况,是因为构建了一个新的镜像,然后为这个镜像打了一个已经存在的标签。Docker创建新的镜像,并赋予这个镜像标签。之前拥有这个标签的镜像会被移除这个标签。
docker image ls --filter dangling=true:显示悬虚镜像。可以使用–format参数通过Go模板。–digest参数在本地查看镜像摘要。
docker image prune:移除全部悬虚镜像。-a参数删除所有没有被任何容器使用的镜像。
Docker目前支持如下的过滤器:
- dangling:可以指定true或者false,仅返回悬虚镜像(true),或非悬虚镜像(false)。
- before:需要镜像名称或者ID作为参数,返回在之前被创建的全部镜像。
- since:与before类似,不过返回的是指定镜像之后创建的全部镜像。
- label:根据标注(label)的名称或者值,对镜像进行过滤。
- 其他过滤方式可以使用reference。例如:–filter=reference=“*:latest*”。
使用docker image ls --format "{{.Size}}"或docker image ls --format "{{.Repository}: {{.Tag}: {{.Size}}"这个的format参数是Go模板对输出内容进行格式化。
docker search <特定字符串>:搜索所有"NAME"字段中包含特定字符串的仓库。“NAME”字段是仓库名称,包含了Docker ID,或者非官方仓库的组织名称。–filter "is-official=true"参数使命令只显示官方镜像。–filter "is-automated=true"参数使命令只显示自动创建的仓库。–limit参数设置返回内容行数,默认25行,最多100行。
docker image inspect <镜像名>:查看镜像层数据和元数据。
docker histoy:显示镜像的构建历史记录,但其不是严格意义上的镜像分层。有些Dockerfile中的指令并不会创建新的镜像层。但是会在镜像中添加元数据。
所有的Docker镜像都起始于一个基础镜像层,当进行修改或增加新的内容时,就会在当前镜像之上,创建新的镜像层。
在添加额外的镜像层的同时,镜像始终保持是当前所有镜像的组合。
Docker采用快照机制实现镜像层堆栈,并保证多镜像层对外显示为统一的文件系统。
多个镜像之间可以共享镜像层。
每个镜像都有一个基于其内容的密码散列值,也被称为摘要(digest)。
docker image pull <镜像名>@<sha256码>:通过镜像摘要拉取镜像。
镜像的唯一标识是一个加密ID,即配置对象本身的散列值。每个镜像层也由一个加密ID区分,其值为镜像层本身内容的散列值。也就是内容散列。
每个镜像层在拉取或推送时,包含一个分发散列值,这是一个压缩版镜像的散列值。该散列值用于校验拉取的镜像是否被篡改过。
为了实现多架构的方便使用,Docker的镜像仓库服务API支持两种重要的结构:Manifest列表(新)和Manifest。Manifest列表是指某个镜像标签支持的架构列表。其支持的每种架构,都有自己的Manifest定义。
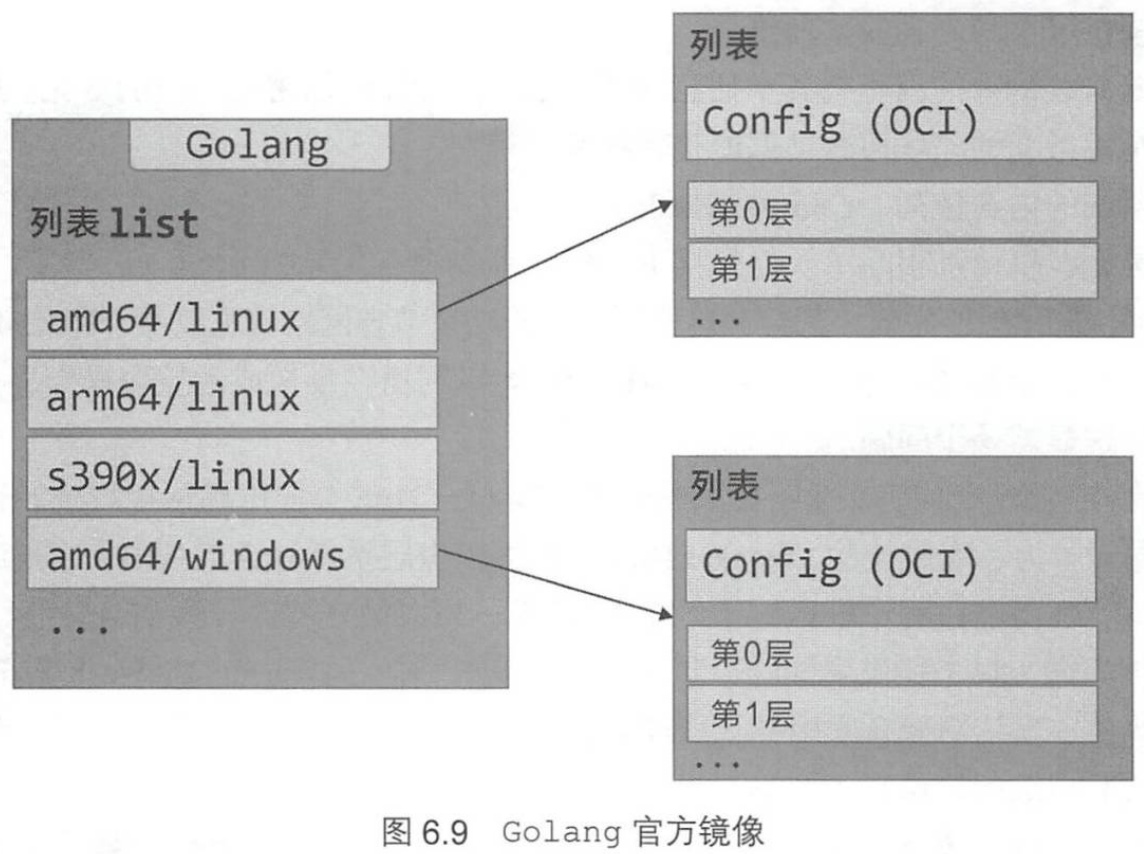
Manifest列表是可选的。在没有Manifest列表的情况下,镜像仓库服务会返回普通的Manifest。
docker image rm <镜像名或镜像ID>:删除镜像。
某个镜像层被多个镜像共享,那只有当全部依赖该镜像层的镜像都被删除,该镜像层才会被删除。
docker image ls -q :返回当前docker主机中所有容器的ID。
docker image rm $ (docker image ls -q) -f
第七章 Docker容器¶
补充¶
镜像是一堆只读层的统一视角。
统一文件系统:将多个只读层重叠在一起,并整合成一个文件系统,对用户隐藏。
在一个运行的容器内部,相应的文件层是不可见的。
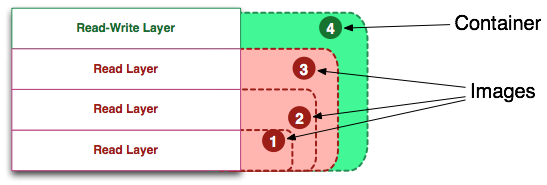
容器和镜像几乎一样,也是一堆层的统一视角。唯一区别在于容器最上面的一层是可读可写的。即,容器=镜像+可读写层
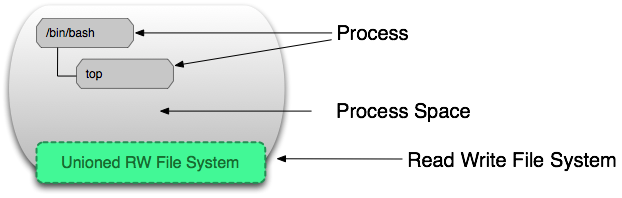
运行态容器:可读写的统一文件系统加上隔离的进程空间和包含其中的进程。
一个文件层包含多信息:1.元数据(metadata):关于这个层的额外信息,它不仅能够让Docker获取运行和构建时的信息,还包括父层的层次信息。**只读层和读写层都包含元数据。**2.指向父层的指针。如果没有这个指针,说明它处于最底层。3.id。
docker ps :;列出所有运行中的容器,隐藏非运行态的容器。-a参数可以列出所有容器。
Docker主要解决了应用隔离、应用部署、资源限制。
其中隔离技术只要依靠的是Namespace,资源限制使用的是Cgroup。